Android Controlled Micro Quadrotor





Project Overview
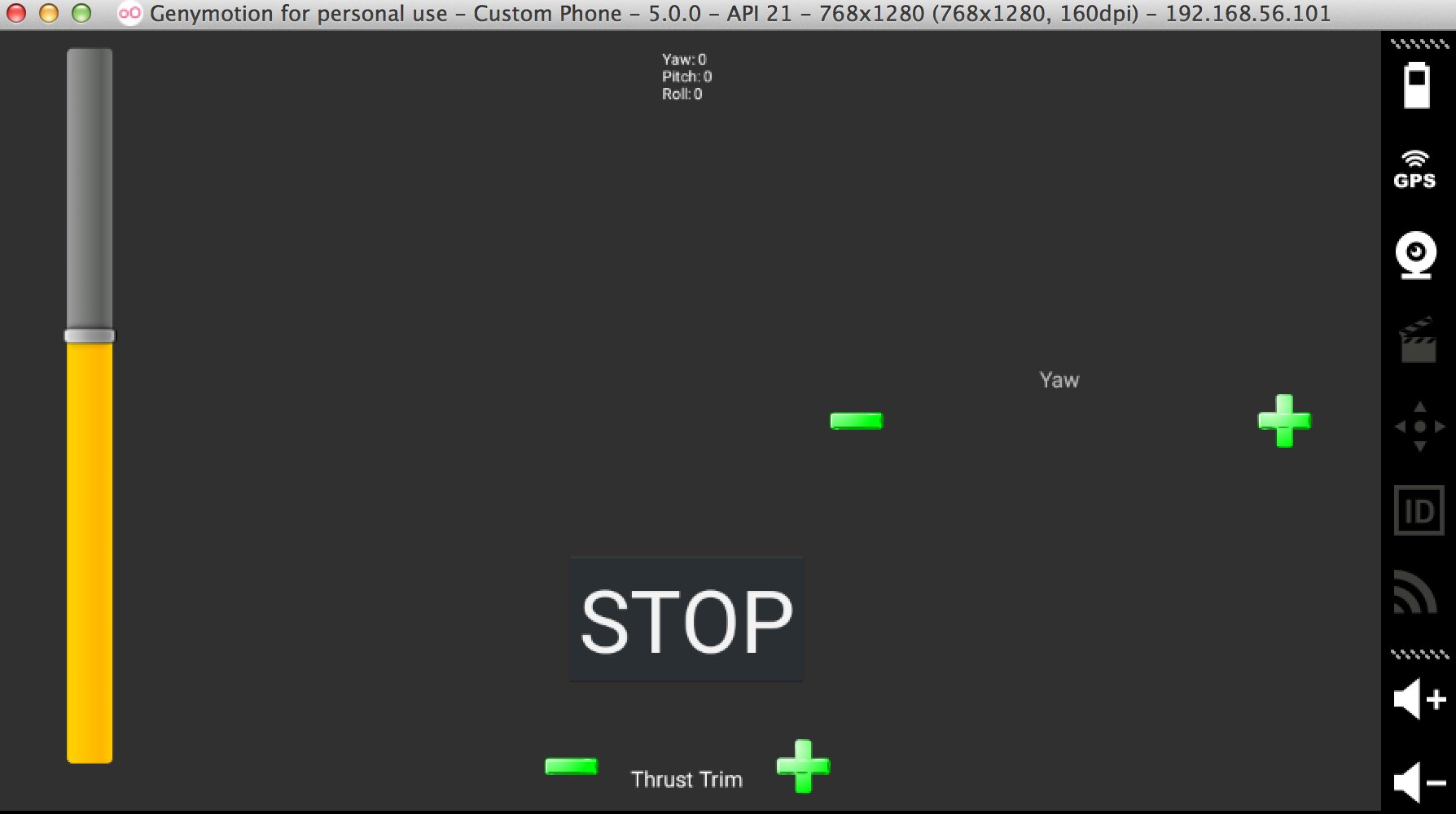
Using an android phone, we are able to effectively fly and control a mini quadrotor. My teammates and I created an intuitive UI to control and send commands to the quadrotor. We used the phone's accelerometer and gyroscope to control roll and pitch, and interactive buttons to control thrust and yaw. We converted these values into milli radians and mili newtons as control inputs which we sent to the quadrotor via USB to a radio transmitter. To prevent crashes we implemented a kill switch which sends a command to turn off all the motors to the quadrotor, and additionally we disabled the motors on app startup and exit.
My Role
Android
I implemented the thrust controller UI, as well as. adapted ModLab's light weight serial packetization scheme for Android Java.
Key Skills
Android Java